Bicyclists are unnecessarily delayed and put at risk by demand-actuated traffic signals that will not turn green for bicyclists. Local routes that are important to bicyclists often cross or turn left at intersections on high-speed, high-volume thoroughfares where one cannot proceed safely or legally without demand-actuated signal protection. While some states and local North Carolina communities (e.g. Cary and Chapel Hill) routinely design and adjust signal sensors to detect bicycles and motorcycles using ordinary inductive loop technology, many communities do not. This article presents recommended policy and practical, affordable engineering practices for reliable detection of non-ferromagnetic bicycles based on standards currently established in California.
Bicycles with metal rims (aluminum or steel) are easily detected by inductive loop detectors that have been properly designed and adjusted to do so. Appropriate loop sensor designs also detect motorcycles, cars, and trucks over the loop without detecting large vehicles in the adjacent lane. Video detection is another common sensing method that allows detection of bicycles. Traffic control devices that are designed and maintained to work properly for all users foster greater respect for traffic control devices and traffic laws in general, which promotes public safety.
California’s Example
In 2007, California enacted a law to require all new and upgraded traffic signal sensors to detect bicycles and motorcycles. This was implemented in 2009 when Section 4D.105 of the 2010 California Manual on Uniform Traffic Control Devices was revised to define California’s performance standard for bicycle detection. As a result, demand-actuated traffic signals in California are now routinely designed and adjusted to detect bicycles. The most common implementation of a sensor meeting the CA standard is a type “D” quadrupole loop, although other loop shapes and video are used as well. Video based detectors in California are adjusted to detect a bicyclist using a headlamp at night.
BikeWalk NC recommends that North Carolina adopt an equivalent standard to California’s, that all new and upgraded demand actuated traffic signal sensors detect non-ferromagnetic bicycles over a 6’x6’ limit line detection zone centered no more than 6’ from the left side of the travel lane. BikeWalk NC also recommends that existing sensors be adjusted to detect bicycles as effectively as possible without unacceptable false detection of adjacent traffic, and that the area of peak sensitivity be marked with MUTCD-compliant bicycle detection stencils when the loop wires have been covered over with pavement.
Technical Background
Inductive loop sensors commonly used to detect vehicles at traffic signals can detect bicycles with wheels made of conductive materials such as aluminum or steel. The shape and size of the loop, the position of the bicycle over the loop, and the sensitivity setting of the detector affect the ability of the sensor to detect a bicycle. Standardized loop designs exist that provide reliable detection of bicycles – in addition to motorcycles and cars – without unintentional detection of vehicles in adjacent lanes.
Detection of bicycles with inductive loops sensors is commonly misunderstood. A lot of people think it depends on detecting a large mass of iron or steel, while others think it depends on weight. Neither is true. An inductive loop sensor detects any type of electrically conductive material, including aluminum. The material does not need to be ferromagnetic.
Normally, inductive loops detect large sheets of horizontal metal, such as the bottom of a motor vehicle. But to an inductive loop, a metal bicycle rim looks just like a sheet of metal, with the crucial difference that bicycle rims are vertical, not horizontal. There are two ways to make an inductive loop detect a vertical bicycle rim effectively. One way is to place the rim at the optimal position over the loop. The other is to install the loop in a shape that allows the sensor physics to detect a vertical bicycle rim no matter where it is placed over the loop.
Sweet Spots of Conventional Loop Sensor Shapes
The two most common configurations of inductive loop sensors used at traffic signals today are the dipole loop (Figure 1), which features one large coil of wire, and the quadrupole loop (Figure 2), which features two coils side-by-side, wound in opposite directions. The most sensitive location for detecting a bicycle rim over a dipole loop is directly above the wire sawcut at either the right or left hand side of the coil. The most sensitive location over a conventional quadrupole loop is directly above the center sawcut, which contains the wires for both coils (twice as many wires as the outside sawcuts). Depending on the sensitivity setting of the detector, a detection may occur if a bicycle’s wheel is positioned as far as a couple of inches away from the sawcut.


Figure 1: Dipole loop. Top: Caltrans design. Bottom: Best locations for bicycle detection.
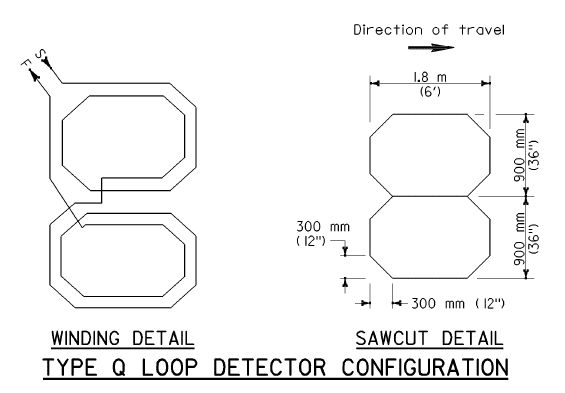
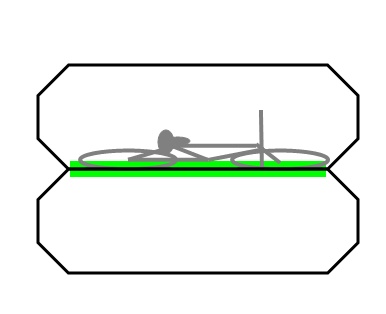
Figure 2: Quadrupole loop. Top: Caltrans design. Bottom: Best location for bicycle detection.
Marking
To assist bicyclists in knowing where to stop, especially when a layer of asphalt has been paved over the sawcuts of a conventional inductive loop, the best location can be marked by a standard bicycle detection pavement stencil as illustrated in Figure 3.
Figure 3: Bicycle detection stencil (2009 MUTCD Figure 9C-7)
Limitations of Conventional Loop Sensor Shapes
A dipole loop shape is an unfavorable design for bicycle detection because it is insensitive to a bicycle in the center of the loop (which is a desirable place for cyclists to stop) and the sensitive edges of the loop are close to vehicles in adjacent lanes, which may cause false readings if the detector is adjusted to a high sensitivity level. A conventional quadrupole loop is better, having its peak sensitivity in the center, but there are still “null” lines about 2/3 of the way from the center to the outside wires where a bicycle wheel will not be detected. Also, the width of the sensitive area adjacent to the wires may still be undesirably low. Increasing the sensitivity of the detector to widen the sensitive area of a conventional quadrupole may not be practical. If the loop length is very long, a high sensitivity setting may result in detection of a large truck or multiple vehicles in an adjacent lane.
Improved Quadrupole Loop Shapes
An improved loop design for bicycle detection is the diagonal quadrupole configuration. A diagonal quadrupole is similar to a 6’ long conventional quadrupole loop, but the center wires are placed at a 45 degree angle to the direction of travel. This creates a horizontal magnetic field that a vertical bicycle wheel will intercept over a wider range of positions. One version of the diagonal quadrupole, called the “quadracircle,” is essentially a circular loop with a diagonal center wire. Another version, called the type “D” loop by the California department of transportation (see Figure 4), includes a gap between the two loops in order to further widen the viable detection area, making it highly effective over the entire loop.
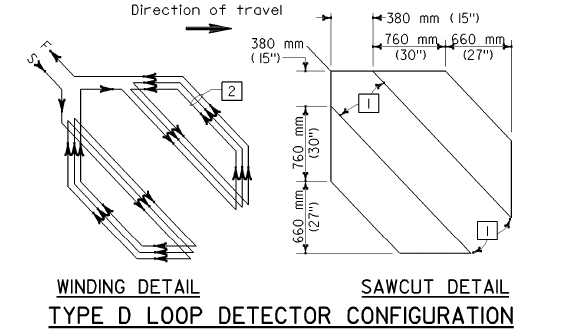
Figure 4: Type D loop. Top: Caltrans design. Bottom: Sensitive area for bicycle detection.
The California Department of Transportation has standardized on the type D loop for bicycle detection. However, some cities have selected the quadracircle design for bicycle detection because it avoids the acute sawcut angles that exist in the type D loop, making it easier to install.
How Inductive Loop Sensors Work
Before comparing inductive loop sensors to other types of vehicle sensors, it’s important to understand the basics of how inductive loop sensors work. Inductive loop sensors operate using a radio frequency alternating current in the loop wire. This alternating current generates a magnetic field around the loop wires that changes direction at the same frequency. The alternating current is generated by an electrical circuit that is tuned to resonate at a given frequency. When a conductive object is placed near the loop such that it intercepts the alternating magnetic field, this induces what are called “eddy currents” in the conductive object, which in turn oppose the magnetic field that the inductive loop was generating. This effect of an object interfering with the magnetic field generation of the inductive loop causes the frequency at which the loop circuit was resonating to increase slightly. The increase in resonant frequency is measured by a computer and registered as a detected vehicle.
Since both aluminum and steel conduct electricity, there’s no significant difference in the ability to detect aluminum versus steel objects. Also, the myth that attaching a permanent magnet to a bicycle will improve its ability to be detected is not true. One would need to move the magnet in and out of the loop at near the frequency of the alternating current in the loop (thousands of times per second) for the permanent magnet to make any difference.
Magnetometer Sensors
Some specialized sensors that were previously marketed for bicycle detection are based on magnetometers rather than inductive loops. A magnetometer measures localized changes in the Earth’s magnetic field that result when a large mass of ferromagnetic material (e.g. iron or steel) is close by. This is similar to the effect of seeing a compass needle move away from North when brought close to a steel object. The problem with using magnetometers for bicycle detection is that they require a substantial amount of ferromagnetic material in order to work, and most modern bicycles use primarily non-ferromagnetic components such as aluminum rims, aluminum or carbon fiber frames, and aluminum cranks. As a result, cyclists using bicycles lacking ferromagnetic components cannot be detected by magnetometer-based sensors, and even those bicycles that do have some ferromagnetic components must be positioned within a few inches of the magnetometer to be detected. For these reasons, magnetometer-based sensors are not suitable for bicycle detection.
Video Sensors
Some traffic signals use video cameras and computer-based image analysis to detect vehicles in each travel lane. These sensors compare each pixel of the current image to a recent image of what the scene looked like without any traffic. If enough pixels within a prescribed region of the image appear different enough from what an “empty” travel lane looks like, a vehicle is detected in that lane.
Video-based detection of a bicyclist is principally the same as video-based detection of a car or motorcyclist; the only potential difference is the smaller number of pixels that might be occupied by the bicyclist. Adjusting for an appropriate minimum vehicle size in the sensor software allows the bicyclist to be detected as reliably as a car.
Radar Detection
Microwave radar not only detects the metal body of a car but also the water in a person’s body, so it can be used to detect bicyclists and pedestrians. The reflection is much smaller than for a car, so computer software can tell the difference. Otherwise it works similar to video detection, with detection areas drawn on a map of the area. Another variety of this sensor type uses an upward-facing radar buried in the pavement; these devices can only detect a bicycle if it is positioned directly over the sensor.
California Standard for Bicycle Detection
In 2007, California enacted a law to require all new and upgraded traffic signal sensors to detect bicycles and motorcycles. This was implemented in 2009 when Section 4D.105 of the 2010 California Manual on Uniform Traffic Control Devices was revised to define California’s performance standard for bicycle detection (see next section). (If bicyclists can be detected, then so can motorcycles.) The California standard requires detection of a bicyclist anywhere in a 6’x6’ area immediately behind the limit line, centered in a normal width travel lane, or centered 6’ from the left lane edge of a lane wider than 12’. The 6’x6′ limit line detection zone was selected because it allowed for both existing (inductive loops) and future detection to be used to detect bicyclists. Also, bicyclist and motorcyclist safety instructors advocate these locations as the safest places for cyclists to wait for a signal.
The California standard for detection defines a reference bicycle rider as “a minimum 4 ft tall person, weighing minimum 90 lb, riding on an unmodified minimum 16 in. wheel bicycle with non-ferromagnetic frame, non-ferromagnetic fork and cranks, aluminum rims, stainless steel spokes, and headlight.” These specifications were chosen in order to accommodate compact folding bicycles, bicycles made of non-ferromagnetic materials, and bicyclists with a small visible signature. Although the California standard is technology-neutral, the requirement to detect bicycles lacking ferromagnetic components (even some types of stainless steel spokes are not ferromagnetic) effectively rules out magnetometer-based sensors. Note that some bicycle rims used by racing enthusiasts are made of carbon fiber rather than metal. These rims can be made to trigger inductive loop sensors by winding a turn of copper wire around the inside of the rim under the rim tape and electrically connecting the ends together.
Excerpts from California Requirements for Bicycle Detection
California Vehicle Code Section 21450.5 Traffic Actuated Signals: Detection of Motorcycles and Bicycles
…
(b) Upon the first placement of a traffic-actuated signal or replacement of the loop detector of a traffic-actuated signal, the traffic-actuated signal shall, to the extent feasible and in conformance with professional traffic engineering practice, be installed and maintained so as to detect lawful bicycle or motorcycle traffic on the roadway.
CA MUTCD 2010
Section 4D.105(CA) Bicycle/Motorcycle Detection
Standard:
All new limit line detector installations and modifications to the existing limit line detection on a public or private road or driveway intersecting a public road (see Section 1A.13 for definitions) shall either provide a Limit Line Detection Zone in which the Reference Bicycle-Rider is detected or be placed on permanent recall or fixed time operation. Refer to CVC 21450.5.
All new and modified bike path approaches to a signalized intersection shall be equipped with either a Limit Line Detection Zone or a bicyclist pushbutton, or else the phase serving the bike path shall be placed on permanent recall or fixed time operation. A bicyclist pushbutton, if used, shall be located on the right side of the bike path and where it can be reached from the bike path. See Section 9B.10 for bicycle regulatory signs.
At new signalized intersections or when the advance detection is being replaced at existing signalized intersections, phases with advance detection only shall be placed on permanent recall.
Support:
The requirement to detect the Reference Bicycle-Rider in the Limit Line Detection Zone is technology-neutral.
Option:
The detection zone in a bike lane may be narrower than 6 ft. See Figure 4D-111(CA).
A Bicycle Detector Symbol may be used. See Sections 9B.12 and 9C.05. A bicyclist pushbutton may be used to supplement the required limit line detection.
Support:
See Section 9B.10 for bicycle regulatory signs.
Guidance:
If more than 50% of the limit line detectors need to be replaced at a signalized intersection, then the entire intersection should be upgraded so that every lane has a Limit Line Detection Zone. The Reference Bicycle-Rider or the equivalent should be used to confirm bicycle detection under the following situations:
- A new detection system has been installed; or
- The detection configuration has been modified.
Section 1A.1329A. Limit Line Detection Zone – a Referenced Bicycle-Rider must be detected in a 6 x 6 ft area immediately behind the limit line, centered either in a normal width lane or if the lane is more than 12ft wide, centered 6 ft from the left lane line. For a lane of 20 ft or greater, two minimum 6 x6 ft areas shall constitute the Limit Line Detection Zone.
Section 1A.1350A. Reference Bicycle-Rider – a minimum 4 ft tall person, weighing minimum 90 lb, riding on an unmodified minimum 16 in. wheel bicycle with non-ferromagnetic frame, non-ferromagnetic fork and cranks, aluminum rims, stainless steel spokes, and headlight.
Adjustment of Detectors
Adjustment of a video-based traffic detector to detect bicycles requires the participation of a bicyclist or a surrogate of the appropriate size and shape. Inductive detectors, however, can be adjusted using only a conductive bicycle rim. Figure 5 below shows an aluminum bicycle rim mounted by a non-conductive bolt to a wooden block in order to hold the rim upright at appropriate tire height. Placement of the rim over the center wire of the quadrupole loop triggers the detector when the detector is adjusted to proper sensitivity. Note that larger diameter rims on small tires are more easily detected than small diameter rims on fatter tires. A 20″ or 26″ rim size is recommended for detector calibration in order to ensure detection of compact and folding bicycles.


Figure 5: Inductive detection of an aluminum bicycle rim. Top: Aluminum rim mounted to a wooden block using a nylon bolt and nut. Bottom: Detection of the rim place over the center wire of a quadrupole loop detector.
Additional Information
How to Turn Signals Green – by BikeWalk NC
Bicycle Detection at Traffic Actuated Signals by Bob Shanteau, Ph.D, P.E.
Caltrans Traffic Operations Policy Directive 09-06 – Implementation of California’s bicycle detection policy
Detection of Bicycles by Quadrupole Loops at Demand-Actuated Traffic Signals by Steven Goodridge, Ph.D.
Making Signal Systems Work for Cyclists – FHWA
Detecting Bicycles and Motor Vehicles using the Same Detector Loop by Robert M. Shanteau, Ph.D, P.E.
Traffic Signal Actuators: Am I Paranoid? by John Allen